%matplotlib inline
import numpy as np
Direct Calibration#
For this tutorial we will use files contained in the fluidimage repository. We assume
that fluidimage has been installed with python setup.py develop and we deduce the path
of the repository from the path of the package fluidimage:
from fluidimage import get_path_image_samples
We first import the class CalibDirect
from fluidimage.calibration import CalibDirect
Give number of pixels of images and the path of grid points made by UVMAT
path_cam = (get_path_image_samples() /
'4th_PIV-Challenge_Case_E/E_Calibration_Images/Camera_01')
glob_str_xml = path_cam / 'img*.xml'
shape_img = 1024, 1024
calib = CalibDirect(glob_str_xml, shape_img)
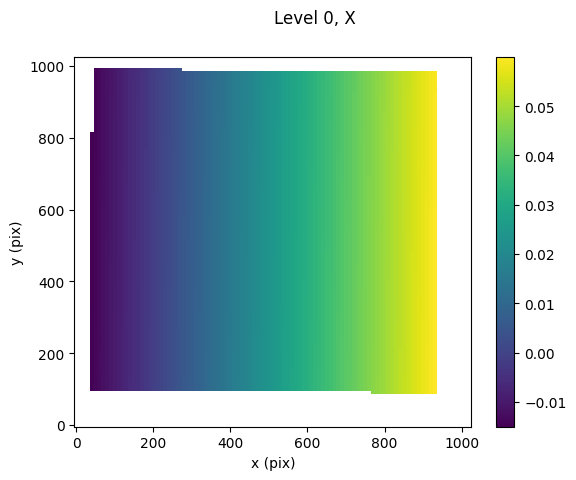
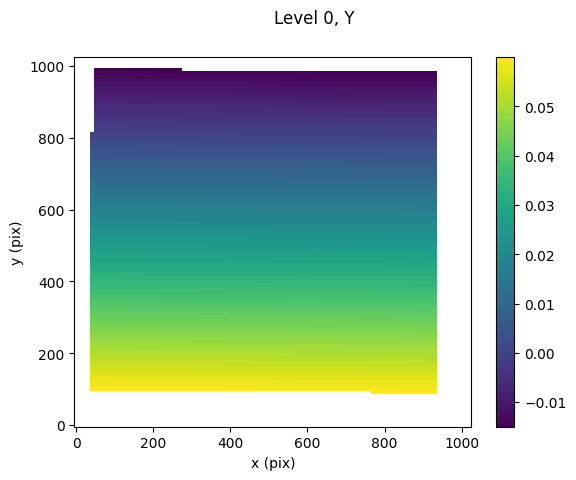
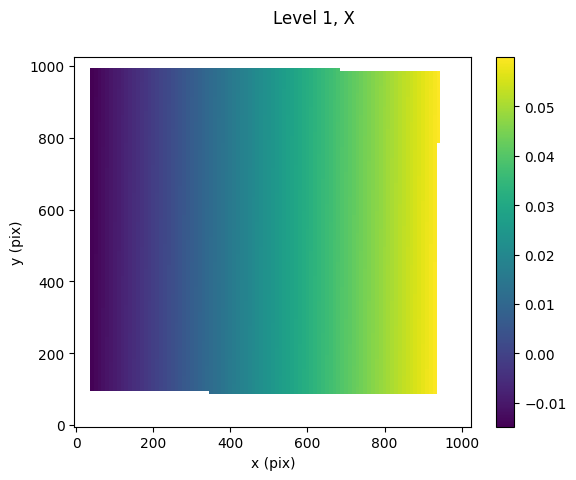
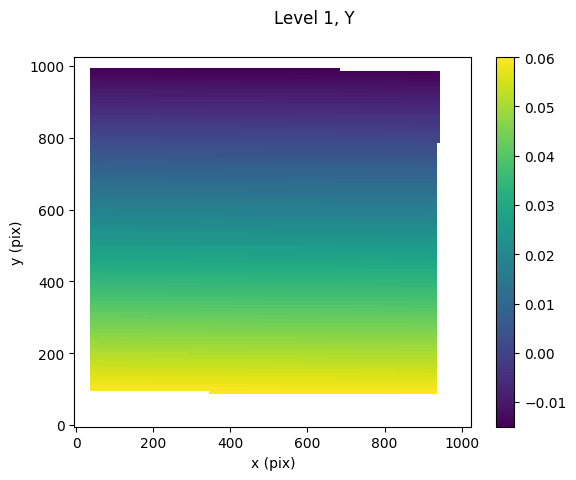
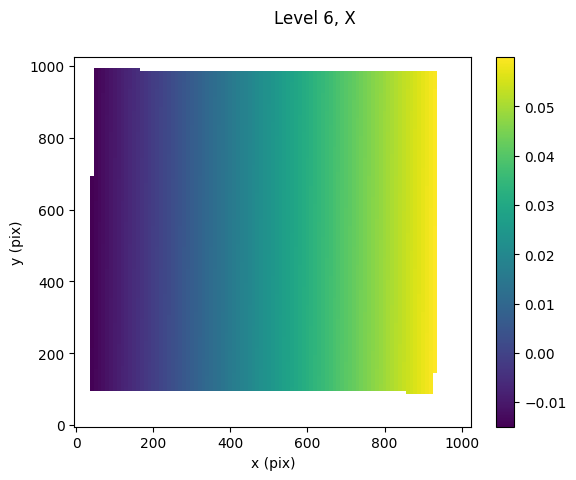
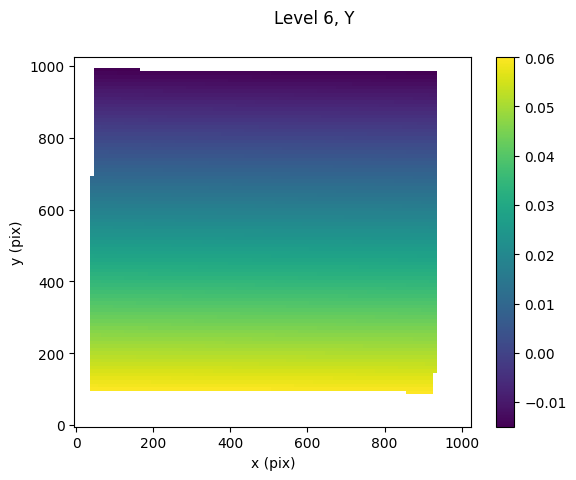
We now compute interpolents able to compute the physical coordinates from the indices in the images and (for each level)
calib.compute_interpolents()
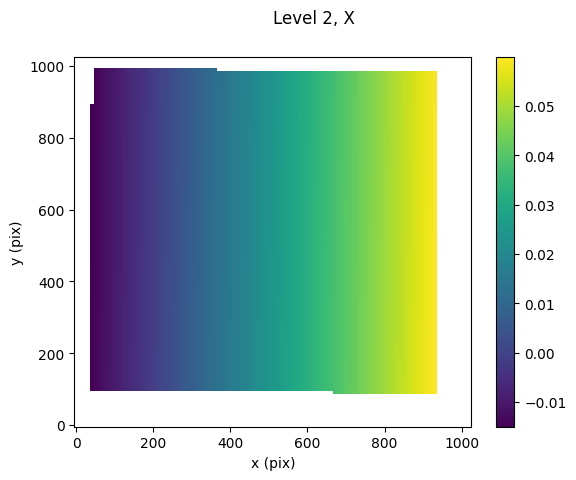
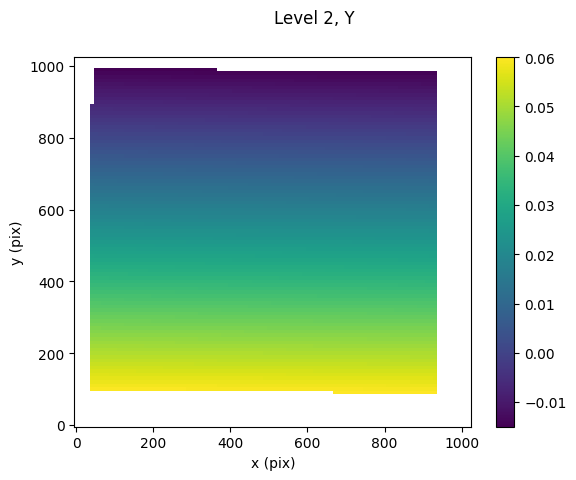
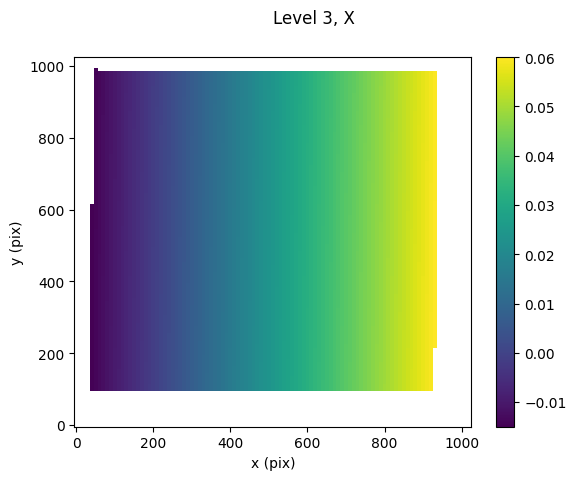
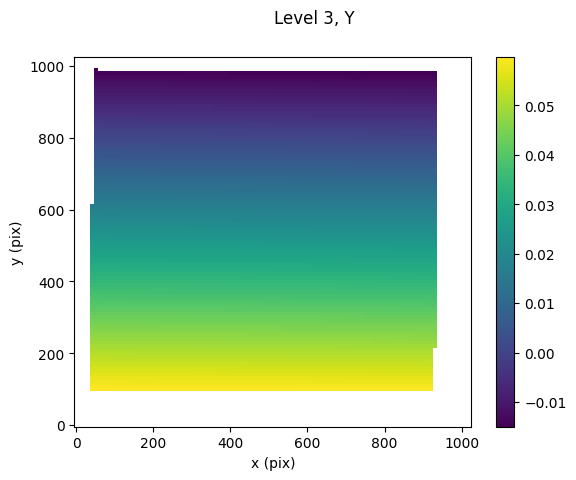
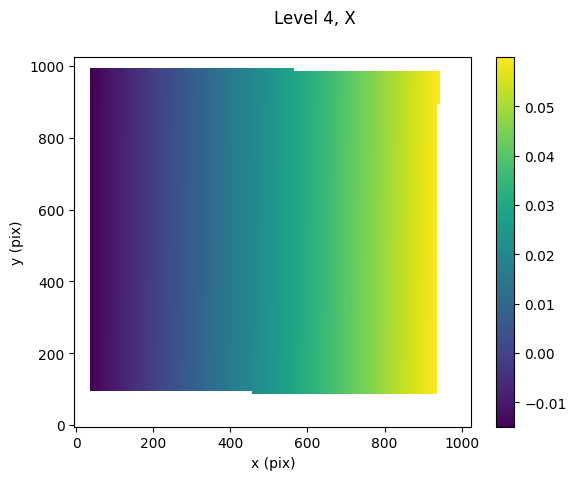
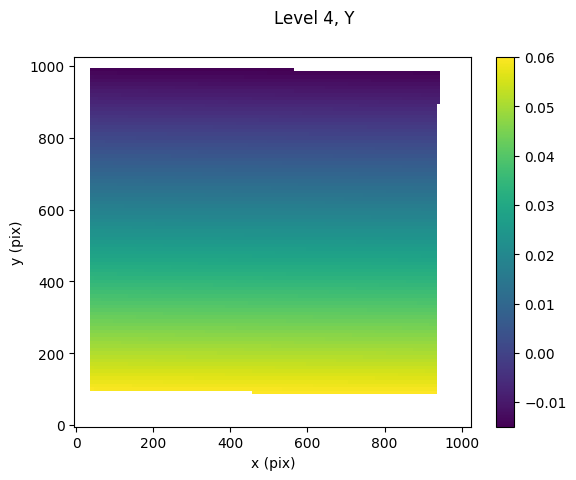
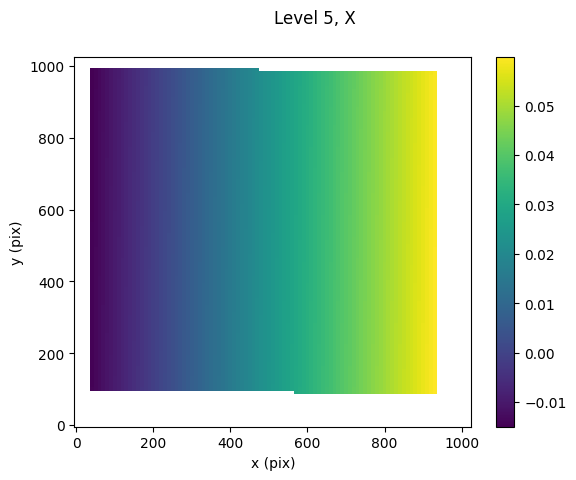
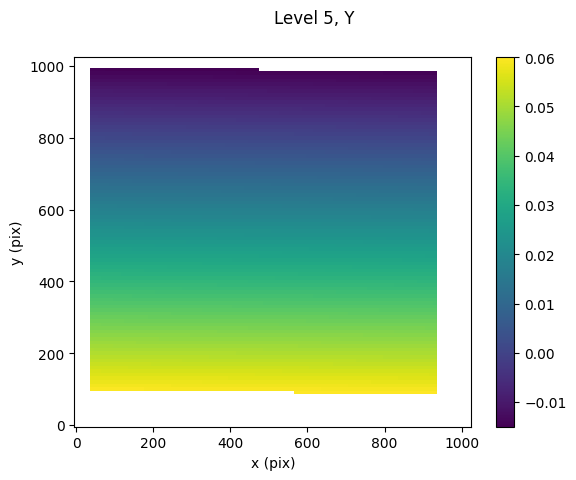
The quality of this step can be checked with the function check_interp_levels
calib.check_interp_levels()
And finally, we compute the interpolents for equations of optical paths from nbline_x * nbline_y lines and save the calibration
nb_lines_x, nb_lines_y = 128, 64
calib.compute_interpolents_pixel2line(nb_lines_x, nb_lines_y, test=False)
calib.save(path_cam / 'calib1.npy')
It is very important to check that everything seems all right because it is easy to make something wrong with such calibration.
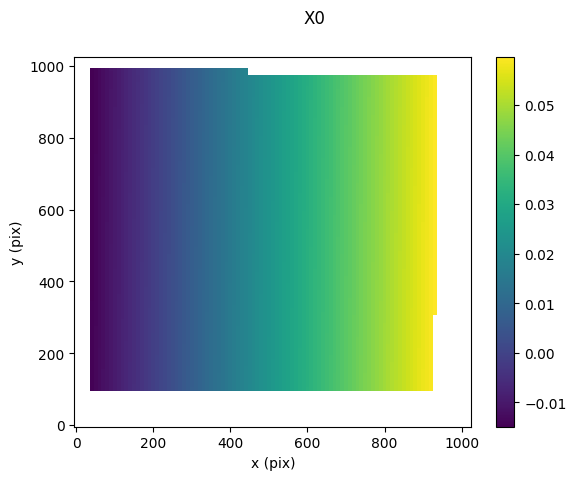
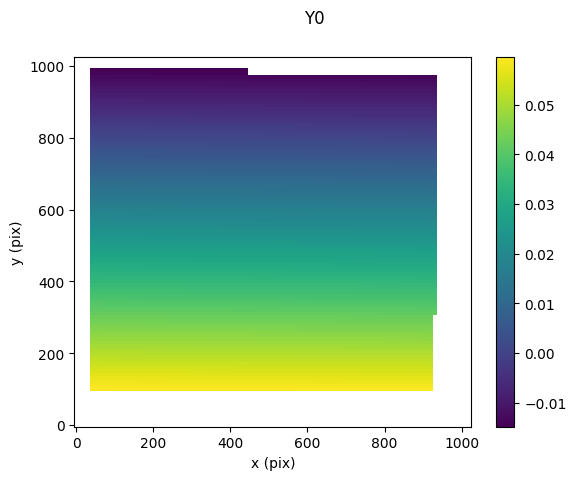
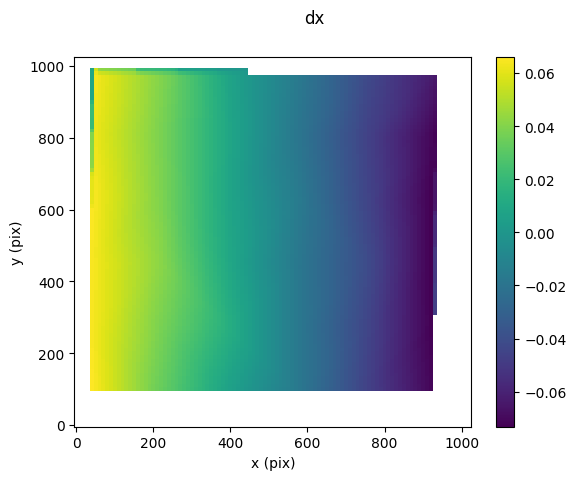
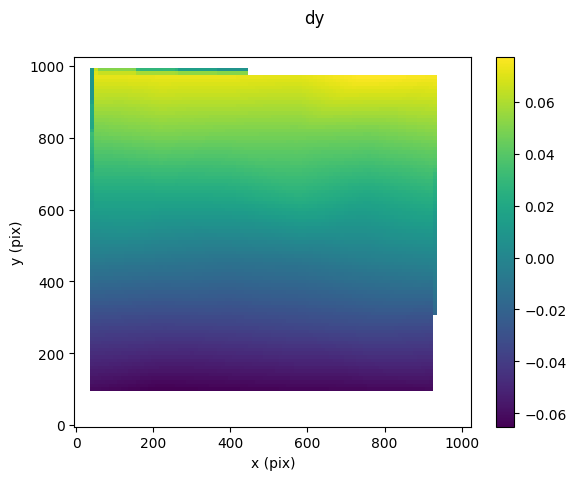
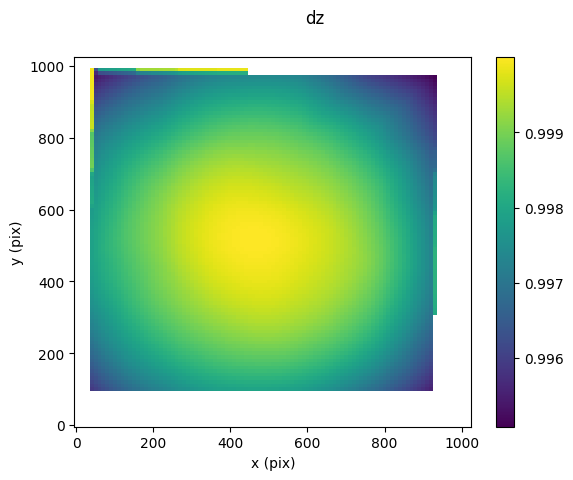
calib.check_interp_lines()
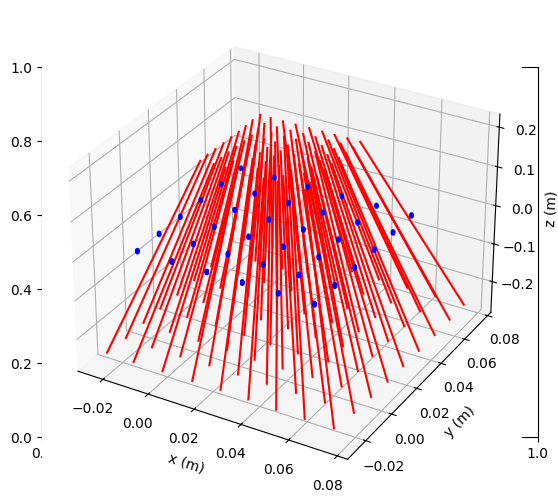
calib.check_interp_lines_coeffs()

from fluidimage.calibration.util import get_plane_equation
z0 = 0.05
alpha = 0
beta = 0
a, b, c, d = get_plane_equation(z0, alpha, beta)
indx = np.arange(100, 1000, 100)
indy = np.arange(100, 1000, 100)
calib.intersect_with_plane(indx, indy, a, b, c, d)
array([[-0.00671866, 0.05637488, 0.05 ],
[ 0.0007478 , 0.04863884, 0.05 ],
[ 0.00846414, 0.04101173, 0.05 ],
[ 0.01589005, 0.03330709, 0.05 ],
[ 0.02338467, 0.02571621, 0.05 ],
[ 0.03096371, 0.0183319 , 0.05 ],
[ 0.03840155, 0.01049245, 0.05 ],
[ 0.04587657, 0.00284014, 0.05 ],
[ 0.05364159, -0.00467532, 0.05 ]])
dx = np.random.randint(0, 5, indx.size)
dy = np.random.randint(0, 5, indx.size)
calib.apply_calib(indx, indy, dx, dy, a, b, c, d)
array([[ 1.46345466e-04, -2.30750931e-04, 0.00000000e+00],
[ 2.28518899e-04, -3.07108224e-04, 0.00000000e+00],
[ 3.07220976e-04, -1.54195228e-06, 0.00000000e+00],
[ 2.97873870e-04, -2.30079150e-04, 0.00000000e+00],
[ 3.03599011e-04, -3.00132308e-04, 0.00000000e+00],
[ 1.52803881e-04, -2.24528456e-04, 0.00000000e+00],
[ 3.02959105e-04, -6.48865907e-06, 0.00000000e+00],
[ 1.52153318e-04, -3.00905448e-04, 0.00000000e+00],
[ 8.28406986e-05, -3.03225201e-04, 0.00000000e+00]])